Dredging scenarios considered
To assess the sensitivity of the seawater
intake to the turbidity generated by the
dredging activities on site above the natural
background levels the following dredging
scenarios were considered:
- Scenario A – typical TSHD operation with
overflow, considering a dredging cycle of
2 hours and 45 minutes (min), including
90 min loading with 60 min overflow.
Conservative values were applied for
the drag head and overflow spill rate,
respectively 10 kilograms per second (kg/
sec) and 300 kg/sec.
- Scenario B – typical TSHD operation
with overflow equal to Scenario A, but additionally, a standing silt screen was
considered in the model.
- Scenario C – continuous operation (no
dredging cycle implemented) of TSHD
without overflow and cutter suction dredger
(CSD). This dredging scenario represents
an alternative temporary dredging method
that could be applied as part of an adaptive
dredging approach when required.
Results: turbidity assessment and
permit acquisition
The pre-tender modelling was conducted as a
feasibility assessment. Based on this initial
modelling, it was concluded that dredging near
the seawater intake would be feasible for all
considered wind and tide conditions, provided
that only the excess sediment concentrations
from the dredging operations are considered.
However, distinct effects of different ambient
wind conditions were observed, resulting in
varying plume dispersion patterns. Winds such
as the more frequent land-sea breeze and
westerly winds are generally favorable for the
plume dispersion, while winds blowing from
the East lead to higher turbidity levels at the
intake. In addition to the computed excess
turbidity because of the dredging activity,
the natural background turbidity must also
be considered at the seawater intake. In
scenarios with unfavorable combinations of dredging activities, wind conditions and
elevated background turbidity, the resulting
turbidity levels could exceed acceptable limits.
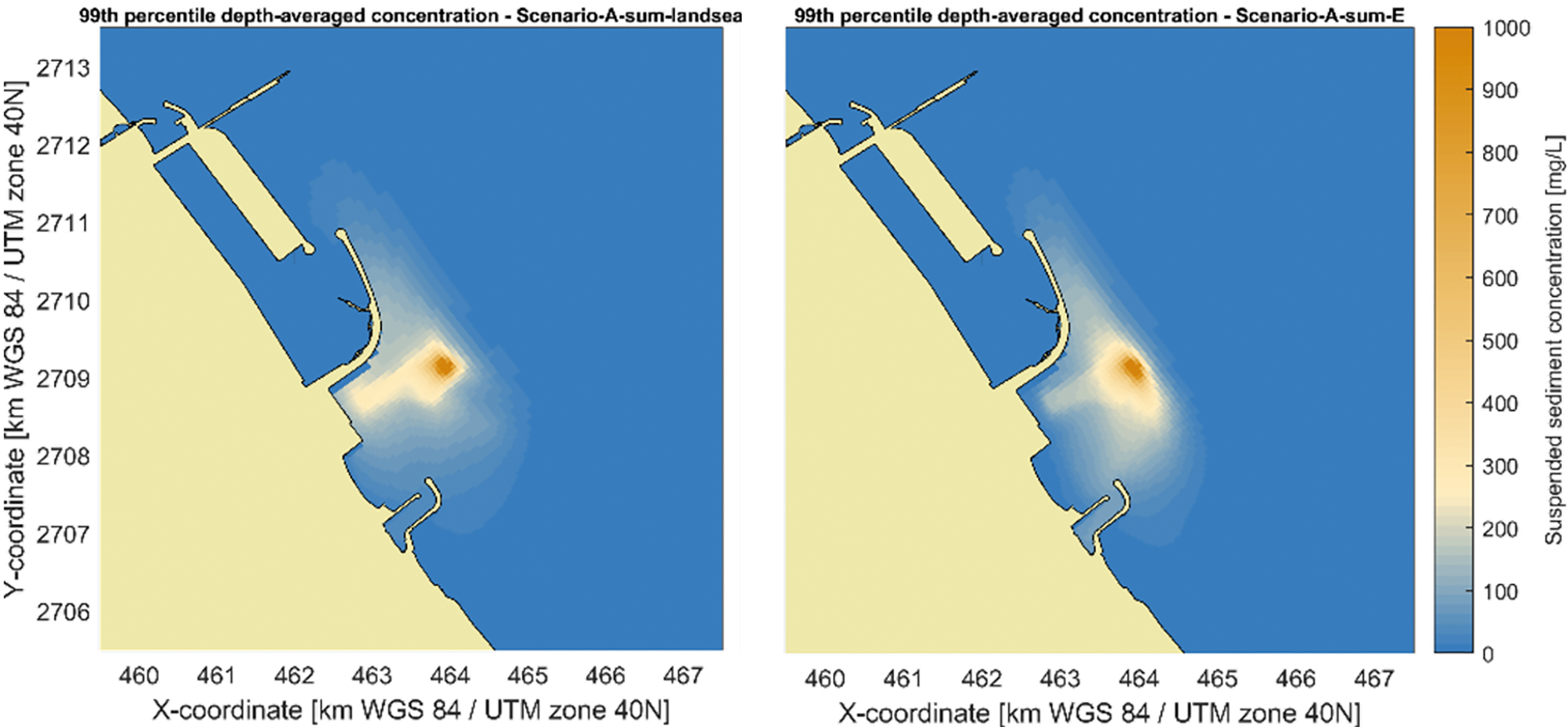
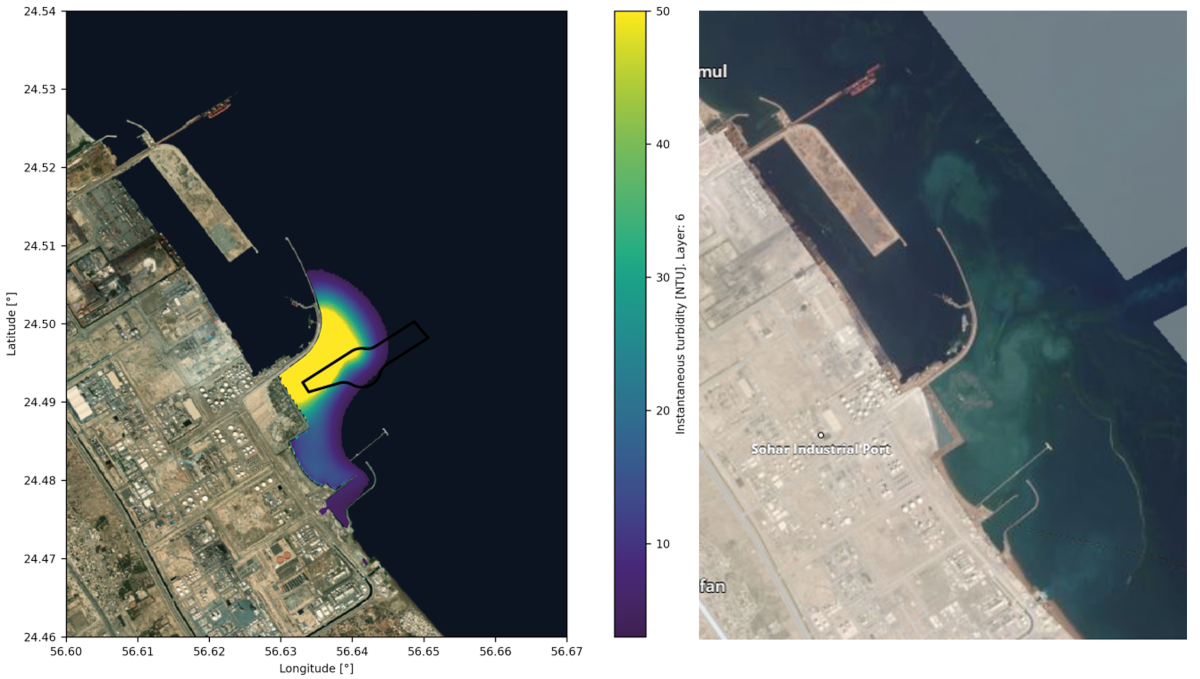
In Figure 2, the model outcome is presented
for maximum (99th percentile) depth-
averaged suspended sediment concentration
(SSC) for the typical land-sea breeze and the
more severe Eastern wind during the summer.
Each scenario is modeled independently,
but in reality combinations of operations
with different equipment and methods may
occur, particularly in projects with ambitious
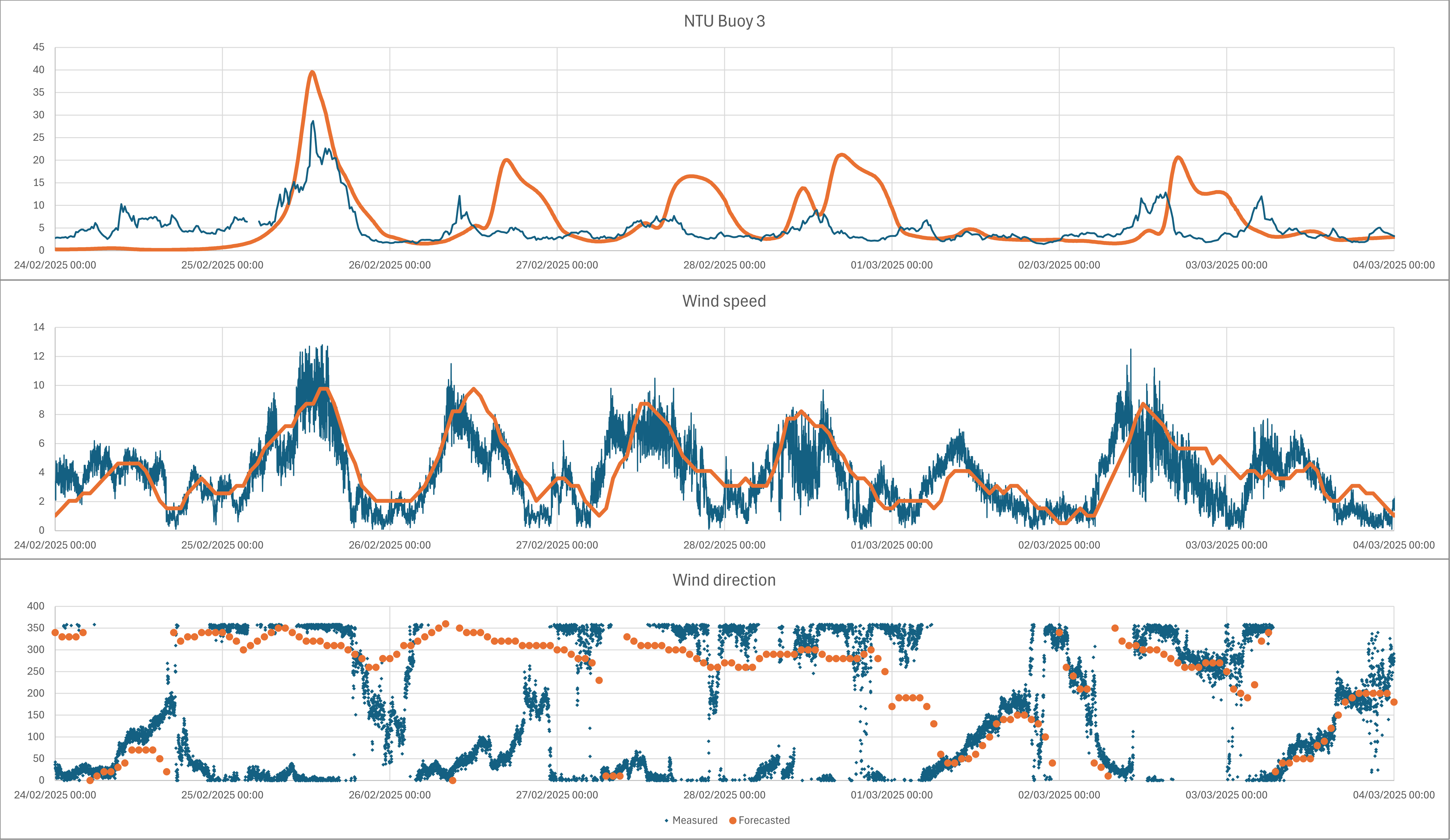
timelines. These factors highlight the importance
of adopting an adaptive dredging method,
one that is based on real-time monitoring
and forecasting. This approach allows for the
optimisation of dredging operations while
minimising environmental impact.
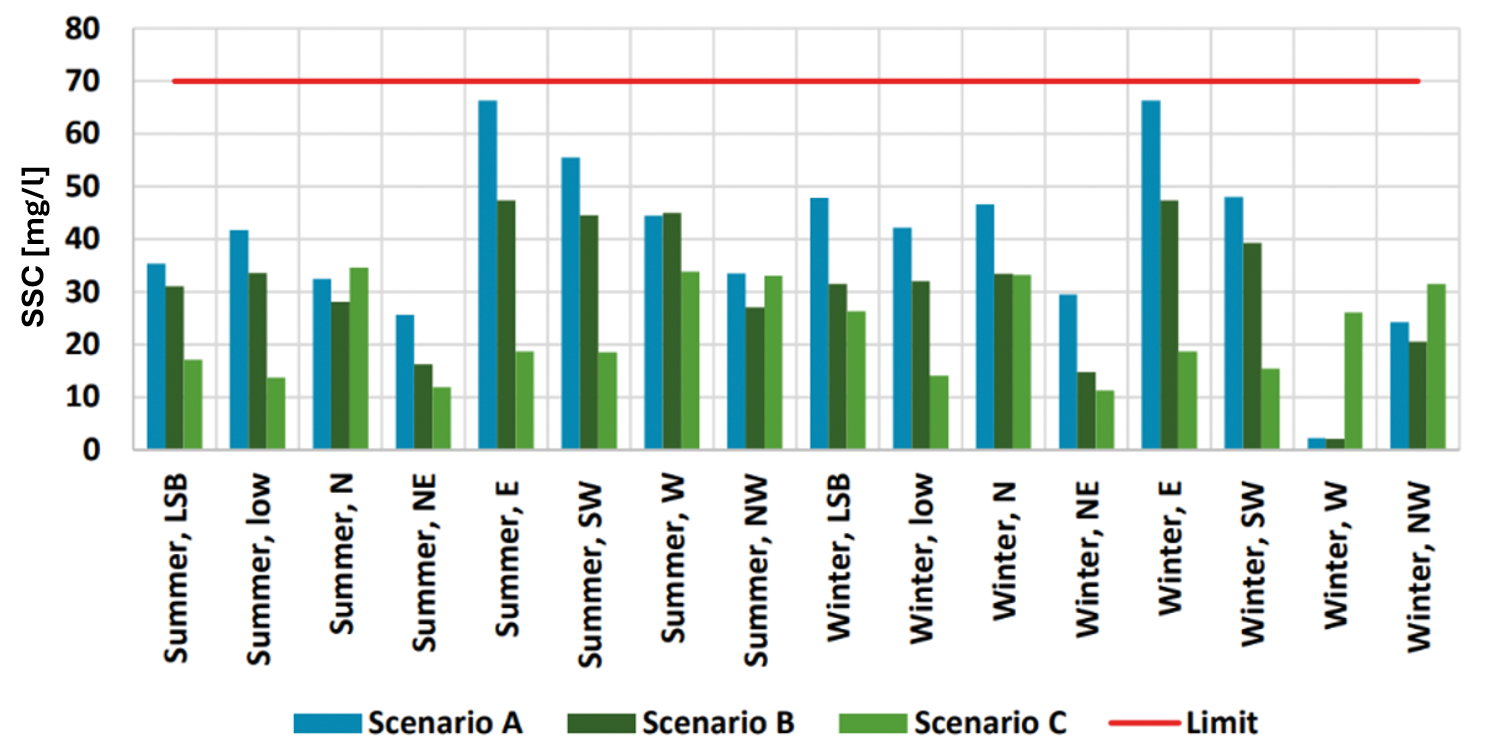
The outcome of the modelling exercise is
presented in Figure 3. It shows the maximum
computed excess suspended sediment
concentration over the simulation period at the
intake location for the different scenarios
considered. The highest values experienced do
not exceed 70 mg/l (equal to approx. 20 NTU)
and are related to dredging scenario under
Eastern wind conditions. Further, the dredging
operations as modelled in Scenario C (no
overflow) clearly show lower values across most
of the different wind conditions, which can be
helpful as a turbidity control mitigation measure.
The modelling assessment also highlighted
that, under certain unfavorable ambient
conditions the turbidity value of 20 NTU for the
seawater intake could be exceeded because the background turbidity is not included in
the model. The same was discussed with
stakeholders in order to obtain the relevant
permits and NOC's and to set turbidity limits
for the project. Turbidity limits must both
prevent disturbance of the seawater intake
and enable an economically feasible dredging
project. The outcome of the pre-tender
modelling (as presented in Figure 3) was helpful
for the authorities to define the allowable
turbidity limits for the project in the permits.
Following the turbidity assessment and
Environmental Impact Assessment, a permit
was granted by the seawater intake operator
for the dredging activities incorporating strict
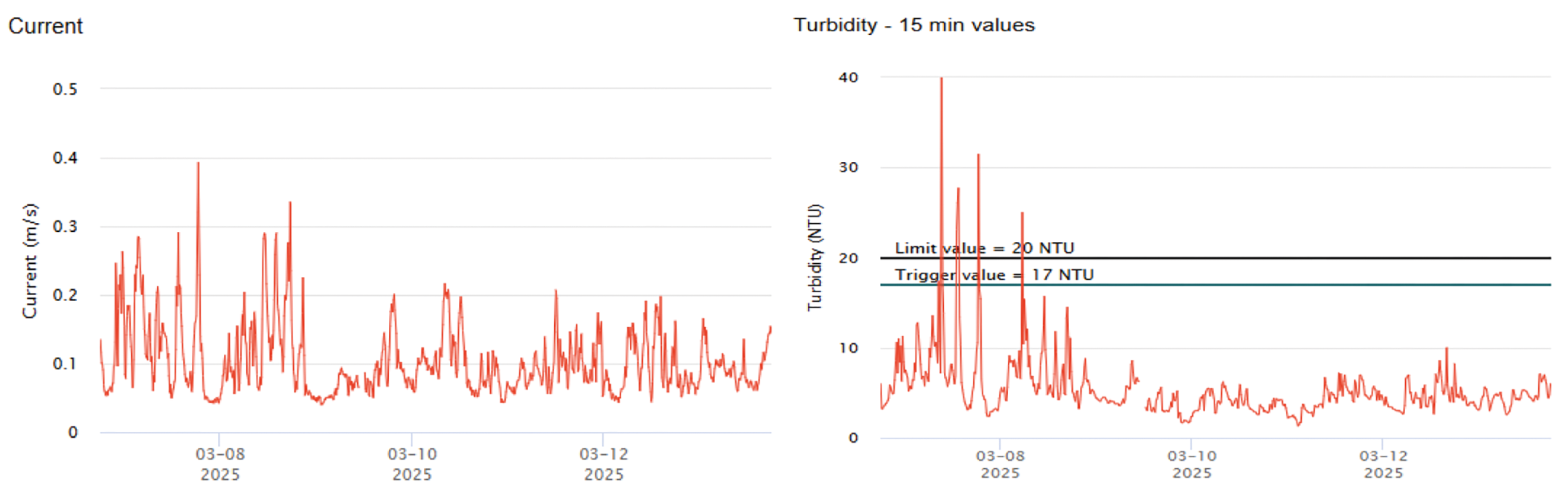
turbidity limits. The not-to-exceed turbidity
limits (including background value), as
defined, are:
- Maximum allowed weekly average of 15
NTU; and
- Maximum allowed peak turbidity of 20 NTU
for no more than a period of 15 minutes in
one hour.